Objavljen rad istraživača Univerziteta u Sarajevu – Elektrotehničkog fakulteta u prestižnom časopisu "IEEE Transactions on Robotics"




Student III Ciklusa studija Univerziteta u Sarajevu – Elektrotehničkog fakulteta, viši asist. Nermin Čović, objavio je rad pod nazivom
"Real-Time Sampling-Based Safe Motion Planning for Robotic Manipulators in Dynamic Environments" (https://ieeexplore.ieee.org/document/11122893)
u prestižnom časopisu IEEE Transactions on Robotics, rangiranom u prvoj kvartili (Q1) iz oblasti robotike (2024 Journal Citation Reports; JCR Q1, Impact factor 10.5). Istraživanje je rađeno u okviru doktorske disertacije pod mentorstvom Prof. dr. Bakira Lačevića. Pored kandidata i mentora, koatori rada su još i dr. Dinko Osmanković i Prof. dr. Tarik Uzunović.
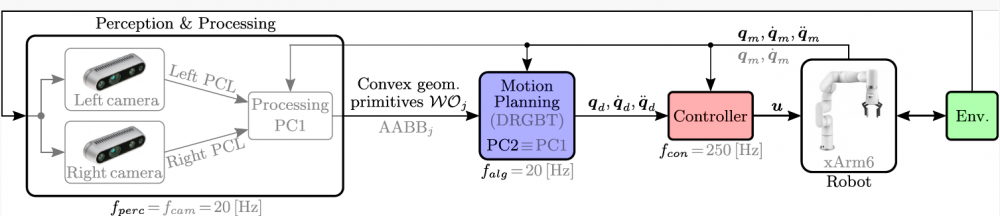
Glavni fokus rada predstavlja novi algoritam za planiranje kretanja robotskih manipulatora u dinamičkom okruženju – DRGBT (engl. Dynamic Rapidly-exploring Generalized Bur Tree) algoritam. Ova metoda radi tako što u realnom vremenu bira skup potencijalnih ciljeva i dodjeljuje im prioritete na osnovu udaljenosti i nedavnih promjena u okolini, te odlučuje kada treba izvršiti replaniranje putanje. Korištenjem mjerenja udaljenosti do prepreka generiše se tzv. „dinamički mjehurić“ slobodnog prostora, koji pomaže da se osigura sigurno kretanje robota uz poštivanje svih kinematičkih ograničenja. Predložena metoda pokazuje da može nadmašiti savremene konkurentne algoritme po svim relevantnim kriterijima. DRGBT je testiran kako u simulaciji tako i na stvarnom robotu u različitim scenarijima uključujući i prisustvo čovjeka (https://www.youtube.com/watch?v=lG7q0PuFhG0). Demonstrirane su izvanredne performanse koristeći pristupačan hardver i sekvencijalnu arhitekturu, bez potrebe za GPU-ovima ili velikom paralelizacijom.
Istraživanje je omogućeno i djelimično finansirano od strane Ministarstva za obrazovanje i nauku Kantona Sarajevo kroz projekat SPEAR (Senzorski bazirano Planiranje krEtanja kolAborativnih Robota) – javni poziv iz 2019. godine, broj 11‑05‑14‑27164‑1/19. Projekat je omogućio nabavku opreme neophodne za eksperimentalnu validaciju i uključuje robotski manipulator xArm6 i dvije dubinske kamere Intel RealSense.






